人間模倣ロボット像「Eccerobot」
人間のそれと限りなく装置の骨格と内部構造を限りなく人間のそれと近似させてモデル化し機械の意識を調査する目的のためデザインされた最初の人体模倣ロボット像「Eccerobot」のエキシビションから2年以上を経て、このロボットをdesignboomで今回紹介したい。今年始め、「Eccerobot」のための新しい機械操作フレームワークがエンジニアリングを学ぶ学生たちのための国際文化学術会議にて1等賞を受賞した。「Eccerobot」はロボット工学専門家のOwen Holland氏とベルグレード大学のETF Roboticsリサーチグループによって開発された。
「通常の人型ロボットは人間の形態を模倣しますが、このようなロボットに使用されているメカニズムは人間のそれとはだいぶかけ離れてており、これらのロボットの特性はこのメカニズムを反映することです。故にこれらのロボットの環境との認識関与の性質からして周辺環境から学ぶことの可能な知識に関して営むことのできる対話の種類は著しく限られています。」- ETF Researchチーム
なお最新の「Eccerobot」アップデート版には新しい装置機能を「教える」手段として補強学習を使用したより高いレベルの認識機能の開発が含まれている。例として補強学習技術の架空シミュレーションをこの記事の最後にビデオで紹介(ここをクリック)。
FET (European Future Technologies) にて2011年に行なわれた作動する「Eccerobot」のデモンストレーション
Video via Popsci

腱と作動装置

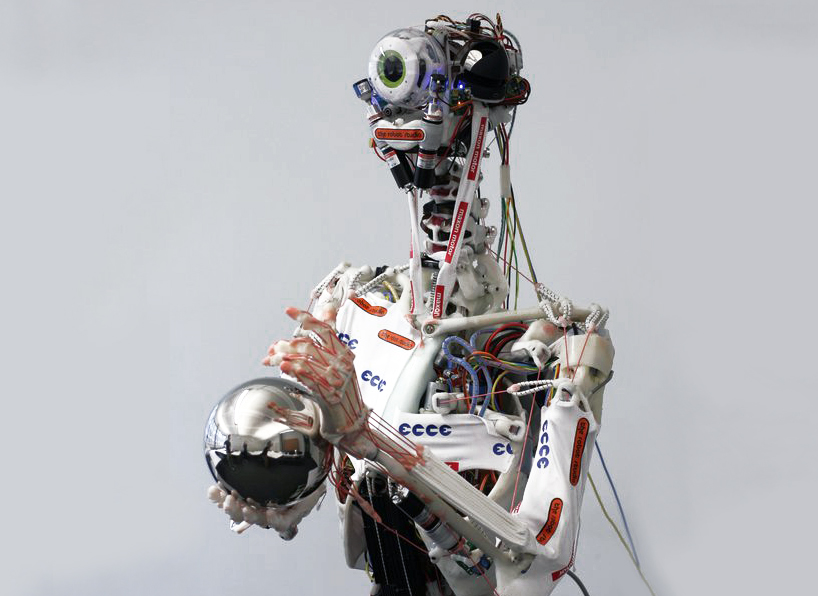
横からの様子
「Eccerobot」の骨格及び関節は加熱によって柔らかくない正確な形態に成型できる高伸張性ポリマーという熱可塑性多形体からできている。およそ80もの「筋肉」がそれぞれ動きの作動装置に依存する。それぞれがギアボックスとスクリュードライバーモーター、凧糸による「腱」、弾性緩衡ゴムからなる。
センサーシステムが自己受容性感覚(身体のパーツの位置を感じること)、視覚的処理、振動センサーを備えた可聴周波、内蔵ユニット及び触覚反応を網羅する。そしてこれらのシステム全体にわたって、エンジニアたちは例えば同じ速度で頭を動かさずに本を揺らすことなくまた文章を読む視野を妨げることなく人間が本を呼びながらうなずくことが出来る理由の原因である人工的な前庭眼反射を作動する人間の反射神経及び入力処理を模倣しようと試みている。またFPGA(集積回路)を備えた2台の高解像度カメラによって効率的な視覚的インプットの前処理および処理が可能。加速時計を通して振動及び衝撃感覚がデータの補足情報源を提供するが、2つのマイクロホンが人間の耳によって感知された指向性及び音響的性質を同時に模倣する。
このロボットの「認識機能」と動作は随意的もしくは不随意的運動制御装置「ECCEOS」(多くの情報と機能を同時に集積する物理学に基づいたコンピュータモデル)、「知覚」「計画」「判断」をまとめる高度装置から成り立っている。

腕部分の骨と筋肉のメカニカルレンダリング
「Eccerobot」の構築過程と作動する様子を紹介
制作チームによる最新のビデオでは強化された学習力によって目的の物体に接触する能力に関する物理学に基づいたモデル改良のレンダリングを紹介